Research activities revolve around “driving volatility” are focused on the following:
- Examining instantaneous driving decisions and trip-level driving volatility at a microscopic level,
- Analyzing location-specific volatility,
- Investigating instantaneous driving decisions related personal optimal policies of drivers,
- Development of Markov Decision Process-based traffic flow algorithm,
- Application of gossip algorithms. The results are summarized.
The results from Markov Switching models reveal that acceleration and braking are two distinct regimes in a typical driving cycle, with braking showing substantially greater volatility (see below). Compared to braking, the acceleration regime typically lasts longer. As expected, some drivers show greater volatility than others, especially when driving on local and state routes. Importantly, when more objects surround a vehicle, the tendency is to accelerate even more if a driver is in acceleration regime and to accelerate or lower the intensity of their braking if a driver is in the braking regime.
Transition Probabilities
| Freeway Trips | Local Road Trips | |||
|---|---|---|---|---|
| Transition Probabilities | Acceleration | Deceleration | Acceleration | Deceleration |
| Acceleration | 0.87 | 0.13 | 0.93 | 0.07 |
| Deceleration | 0.12 | 0.88 | 0.06 | 0.94 |
A novel framework is developed that helps in monitoring of acceleration and braking at a microscopic level, which can generate alerts and warnings, provided through advanced traveler information systems. The study shows that sequence of acceleration and braking events and vehicular jerk are key driving behavior factors to consider. Results revealed that the amount of warnings/alerts varies significantly between driver groups and it is highly associated with young drivers, new vehicles, two-seat vehicles, AM and PM rush hours, and commuter trips.
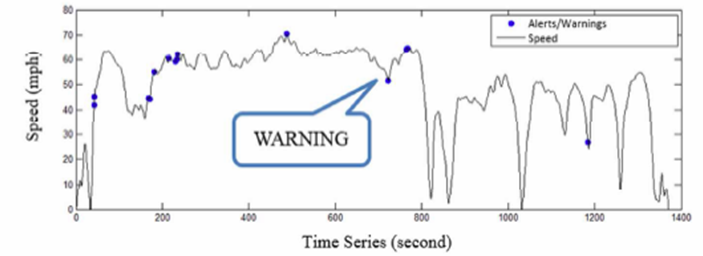
Alerts/warnings generated during a trip.
A fundamental understanding of instantaneous driving decisions is developed by examining two-dimensional instantaneous accelerations, i.e. longitudinal and lateral accelerations. Instantaneous driving volatility is captured by characterizing extreme driving events (Figure 3), and it clearly shows that driving behavior is strongly associated with driving contexts, whether driving on local roads or freeways. The results from empirical analysis revealed that extreme events identified in BSMs are strongly correlated with trip attributes, driver maneuvers, and driving contexts, which can help in real-time generation of warnings and alerts (Figure 4).
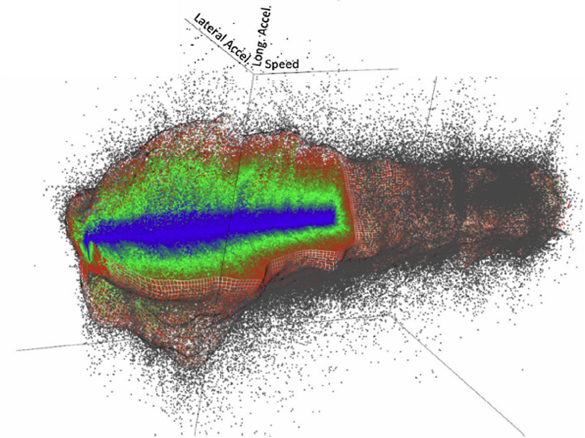
Figure 3: Plots of extreme acceleration events {hallowed in side)
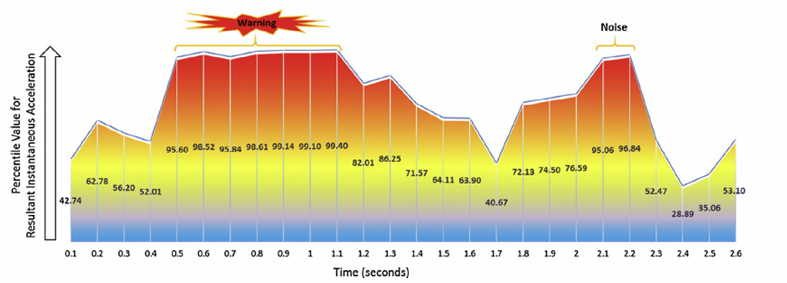
Figure 4: Generating warning and control assists.
Using unique connected vehicle and crash data at intersections, we found that location-based volatility is positively associated with crash frequency (Figure 5). On average, a one-percent increase in the coefficient of variation in longitudinal accelerations/decelerations is associated with 0.25 increase in crash frequency for signalized intersections, while controlling for other factors. If many drivers behave in a volatile manner at a specific intersection, then such intersections can be identified before accidents happen. Of course, the reasons for volatile behaviors may be related to intersection and environmental conditions, vehicles’ and drivers’ conditions.
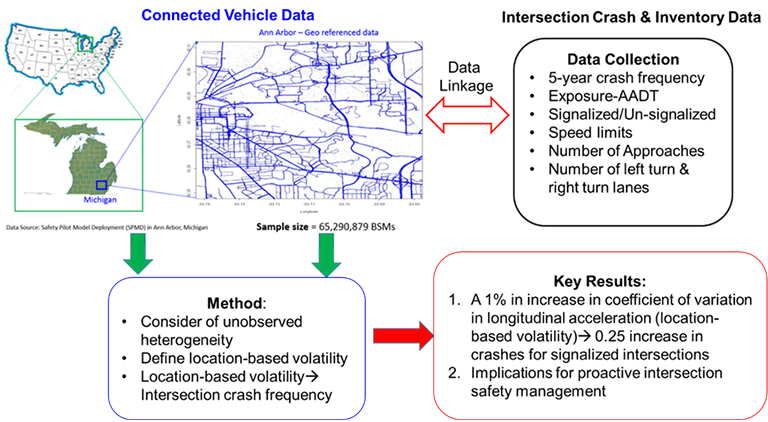
Figure 5: Methodology and key results for location-based volatility study.
Application of Markov Decision Process (MDP) and Inverse Reinforcement Learning (IRL) provide valuable insights about driver-specific optimal policies that maximize the expected sum of rewards obtained by drivers in making instantaneous driving decisions (see chart below). The MDP and IRL results show that when drivers have no objects surrounds them, acceleration is the prevalent personally optimal policy. With more surrounding objects, drivers choose to (or are constrained) to either brake or maintain constant speed as their personally optimal policy. Analysis of data shows that 65%, 53%, and 38% of drivers’ personally optimal policies are to exit 3+, 2, and 1 surrounding object, respectively. In other words, with more surrounding objects, drivers try to avoid them as their personally optimal policy.
In related efforts, drivers in a group of vehicles were modeled as Markov agents and an MDP was solved at each time step for every pair of agents in the set. Each pair of automata negotiated between policy iterations to emulate the ability of human drivers to predict the actions of other drivers. The algorithm successfully replicated driver behavior in situations where no external forces cause vehicles to stop, and was robust in handling lead vehicles as well as middle vehicle stopping suddenly, as part of a platoon. The calibrated model successfully matched naturalistic driving data for a 30 second period.
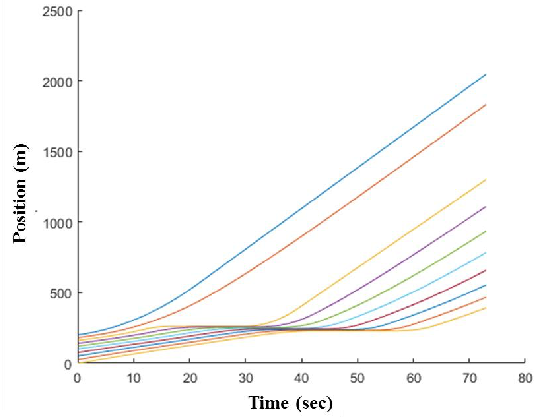
Figure 7a: Simulation of forced stop of Vehicle 3 in a group of 10 Vehicles
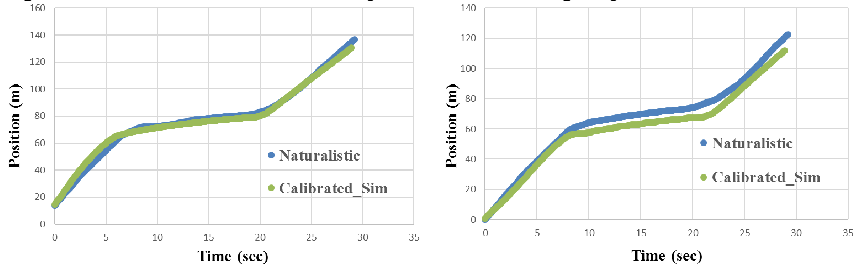
Figure 7b: Calibrated simulated data for the middle vehicle (left) and the guard vehicle (right) along with naturalistic driving data from NGSim.
To model the spread of behaviors in a network of proximate drivers, a particular gossip algorithm called the Voter model was modified and applied. In a simplified setting, each driver was assumed to be repelled by each other driver when making lane choices. The equilibrium solution for the Master equation was analytically obtained and compared with numerical solutions. Behavior of the model regarding dependence of the equilibrium distribution on the number of cars, time taken to reach an equilibrium condition from initial distributions, and the effect of influencers (such as police cars) on the lane adoption behavior were studied.
DVCV faculty fellows have been highly active publishing in (high impact-factor) SCI-indexed peer-reviewed journals and conferences. Publications and presentations supported by DVCV include the following:
- Liu J. & A. Khattak. Delivering improved alerts, warnings, and control assistance using basic safety messages transmitted between connected vehicles, Transportation Research, Part C, Volume 68, pp. 83-100, 2016.
- Salimi Naneh Karan, F. & S. Chakraborty, Dynamics of a Repulsive Voter Model, IEEE Transactions on Computational Social Systems, Vol. 3, Issue: 1, March 2016.
- Khattak A., & B. Wali, Dynamics of Driving Regimes Extracted from Basic Safety Messages Transmitted Between Connected Vehicles. TRB PAPER # 17-00234, Transportation Research Board, National Academies, Washington, D.C., 2017. Submitted for presentation review-to be submitted to Transportation Research, Part C for publication review.
- Kamrani, M. A. Khattak, & B. Wali, Can Data Generated by Connected Vehicles Enhance Safety? A proactive approach to intersection safety management. PAPER # 17-00238, Transportation Research Board, National Academies, Washington, D.C., 2017. Submitted for presentation review-submitted to Transportation Research Record for publication review.
- Khattak A., M. Kamrani, A. Srinivasan, & S. Chakraborty, Applying Markov Decision Process and Inverse Reinforcement Learning to Understand Driving Decisions in Connected Vehicle Systems. TRB PAPER # 17- 00240, Transportation Research Board, National Academies, Washington, D.C., 2017. Submitted for presentation review-to be submitted to IEEE Intelligent Transportation Systems journal for publication review.
- Graves, R.T., D.M. Harris & S. Chakraborty, New vehicle following model: A Markov Decision Process based driver behavior prediction algorithm, TRB PAPER # 17- 00240, Transportation Research Board, National Academies, Washington, D.C., 2017. Submitted for presentation review-to be submitted to IEEE Intelligent Transportation Systems journal for publication review
- Khattak A. Study of Micro-Driving Behaviors at Different Levels of Vehicle Automation and Connectivity, Plenary Session Invited Talk, 16th COTA International Conference of Transportation Professionals, CICTP, Shanghai, China, July 2016.
- Khattak A. The Role of Connected and Automated Vehicles: How can urban areas use the data they create? Seminar presentation at National Center for Transportation Systems Productivity and Management, Civil Engineering Department, Georgia Institute of Technology, March 2016.
- Chakraborty S., Control Algorithms for Cooperative Maneuvers of Connected Vehicles, National Transportation Research Center, Oak Ridge National Laboratory, January, 2016.
- Nambisan, S., Asad Khattak, Subhadeep Chakraborty, Behram Wali, Mohsen Kamrani, Meng Zhang, Russell Graves, Adam Whitfield, and David Harris, Connected Vehicles and Infrastructure: Is this for Real? Presented at the Tennessee State Institute of Transportation Engineers Summer Meeting, Gatlinburg, TN. July 13-15, 2016
- Nambisan S., Asad Khattak, Subhadeep Chakraborty, Behram Wali, Mohsen Kamrani, Meng Zhang, Russell Graves, Adam Whitfield, and David Harris, Exploratory Analyses of Driving Volatility: Considerations for Connected Vehicles and Infrastructure, Presented at Monash University, Melbourne, Australia, July 28, 2016.
- Khattak A. Study of Micro-Driving Behaviors at Different Levels of Vehicle Automation and Connectivity, Plenary Session Invited Talk, 16th COTA International Conference of Transportation Professionals, CICTP, Shanghai, China, July 2016.
- Khattak A. The Role of Connected and Automated Vehicles: How can urban areas use the data they create? Seminar presentation at National Center for Transportation Systems Productivity and Management, Civil Engineering Department, Georgia Institute of Technology, March 2016.
- Chakraborty S., Control Algorithms for Cooperative Maneuvers of Connected Vehicles, National Transportation Research Center, Oak Ridge National Laboratory, January, 2016.
- Nambisan, S., Asad Khattak, Subhadeep Chakraborty, Behram Wali, Mohsen Kamrani, Meng Zhang, Russell Graves, Adam Whitfield, and David Harris, Connected Vehicles and Infrastructure: Is this for Real? Presented at the Tennessee State Institute of Transportation Engineers Summer Meeting, Gatlinburg, TN. July 13-15, 2016
- Nambisan S., Asad Khattak, Subhadeep Chakraborty, Behram Wali, Mohsen Kamrani, Meng Zhang, Russell Graves, Adam Whitfield, and David Harris, Exploratory Analyses of Driving Volatility: Considerations for Connected Vehicles and Infrastructure, Presented at Monash University, Melbourne, Australia, July 28, 2016.